a. Dérivation de 1er ordre : la méthode du gradient
Les
filtres de dérivée première sont des filtres représentant
des opérateurs de différentiation.
Leur prototype est le filtre de gradient qui se calcule généralement
sur 3 points. La méthode du gradient traite les contours qui se
caractérisent sur une image par une discontinuité
des niveaux de gris.
On sait que le gradient des niveaux de gris sur un contour est maximal,
on peut donc effectuer le calcul du gradient sur l'ensemble de l'image,
pour ne conserver que les maxima du gradient.
Le calcul de gradient
Pour l'évaluer, on utilise des applications
de masque qui prennent en considération les variations locales
des niveaux de gris.
Le gradient d'une image est le vecteur
défini par :
Et caractérisé par : un module
et une direction dans
l'image :
Estimation du gradient
Afin de calculer le gradient, l'approche la plus classique pour l’estimer
est de choisir deux directions privilégiées orthogonales,
sur lesquelles on projette le gradient.
On obtient alors le gradient en x et en y :
On peut calculer pour chaque point(x,y) de l’image son vecteur gradient
caractérisé par sa direction qui maximise la dérivée
directionnelle et sa norme est la valeur de cette dérivée.
On obtient la dérivée de I dans une direction quelconque
à
partir des deux dérivées directionnelles définissant
le gradient Ix et Iy de la manière suivante :
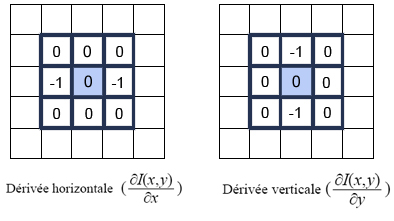
En développant la formule de Lagrange au premier ordre, la dérivée
en un point x d'une fonction f s'obtient par l'approximation suivante
:
Appliquée à une image, on peut définir deux dérivées
partielles, suivant x (colonnes) et suivant y (lignes). Les masques
correspondants figurent ci-dessous :
La dérivation accentuant le bruit (pixels parasites de répartition
aléatoire), des filtres dérivés, plus robustes, on
été proposés.

 défini par :
défini par :